Чтобы тот или иной электрический прибор работал, ему нужен специальный приводной механизм. Одним из таких механизмов является шаговый двигатель. В данном материале вы узнаете, что он собой представляет, каков принцип его работы и какие категории делится.
Что представляет собой шаговый двигатель?
Шаговый двигатель может быть униполярным или биполярным. Он является электрическим и безщеточным двигателем постоянно тока, способным делить полный оборот на несколько одинаковых шагов. В него входят следующие детали:
 специальный контроллер для шагового привода;
специальный контроллер для шагового привода;- магнитные части;
- обмотки;
- приборная панель (она же выступает в роли блока управления);
- передатчики;
- сигнализаторы.
Шаговый двигатель используется в основном для следующих целей:
- работы фрезерного станка;
- работы шлифовального станка;
- обеспечивает работу различных бытовых приборов;
- работы производственных механических средств;
- обеспечивает работу транспорта.
Принцип работы привода
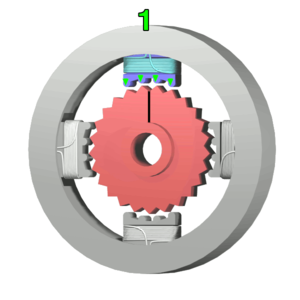 Принцип работы данного привода выглядит следующим образом. При приложении напряжения к клеммам, щетки на самом шаговом двигателе начинают постоянно двигаться. Движок холостого хода имеет при этом уникальное свойство: он преобразует входные импульсы, Что имеют преимущественно прямоугольную направленность, в заранее обозначенное положение приложенного ведущего вала.Каждый из входящих импульсом способен переместить вал под определенным углом. Приборы, которые оснащены подобным редуктором, имеют максимальную эффективность при условии наличия нескольких зубчатых электромагнитов, которые находятся вокруг центрального железного куска, что имеет зубчатую форму. Внешняя цепь управления возбуждает электромагнит. Кстати, купить шаговый двигатель вы можете на страницах нашего специализированного сайта.
Принцип работы данного привода выглядит следующим образом. При приложении напряжения к клеммам, щетки на самом шаговом двигателе начинают постоянно двигаться. Движок холостого хода имеет при этом уникальное свойство: он преобразует входные импульсы, Что имеют преимущественно прямоугольную направленность, в заранее обозначенное положение приложенного ведущего вала.Каждый из входящих импульсом способен переместить вал под определенным углом. Приборы, которые оснащены подобным редуктором, имеют максимальную эффективность при условии наличия нескольких зубчатых электромагнитов, которые находятся вокруг центрального железного куска, что имеет зубчатую форму. Внешняя цепь управления возбуждает электромагнит. Кстати, купить шаговый двигатель вы можете на страницах нашего специализированного сайта.
При необходимости повернуть вал двигателя, то электромагнит, к которому приложена энергия, притягивает к себе зубья колеса. Когда они выравниваются по отношению к электромагнита, они смещены по отношению к последующей магнитной части двигателя.Первый электромагнит выключается, а затем включается второй, после чего начинает вращаться шестерня, выравниваясь при этом с предыдущим колесом. потом такое действие повторяется необходимое количество раз. Каждое из таких вращений называют постоянным шагом, при этом скорость вращения шагового двигателя можно вычислить при подсчете количества шагов, необходимых для полного его оборота.Чтобы контролировать работу шагового двигателя применяется специальный драйвер. Это необходимо в тех случаях, если вы настраиваете повод для работы станка или применяете его для запуска в работу ветрогенератора.
Типы шаговых двигателей
Шаговые двигатели делятся на такие типы:
- с наличием постоянного магнита;
- синхронный гибридный привод;
- сменный двигатель.
Все они несколько отличаются друг от друга, в том числе и по принципам своей работы.Так, например, приводы с постоянными магнитами оснащены специальной магнитной деталью в роторе. такие двигатели работают по принципу притяжения или отталкивания статором и ротором мотора на основе электромагнита.Сменный двигатель имеет обычный железный ротор и работа его построена по принципу фундаментальности. Когда допускается минимальный уровень отталкивания с наименьшим зазором, при этом точки ротора имеют притяжение к полюсам статора.А вот гибридный привод может сочетать в себе оба принципа работы, он считается наиболее дорогой моделью шаговых двигателей.
Двухфазные шаговые двигатели
 Двухфазный мотор очень простой, его можно установить человеку без специального опыта. Независимо от того, собрали ли вы его самостоятельно или приобрели в готовом виде, он имеет два типа обмотки для катушек:Если шаговый двигатель имеет одну обмотку с центральным магнитным краном, что влияет на каждую фазу, то это униполярный повод. Каждую обмотувальної секцию следует включить, с целью обеспечения нужного направления магнитного поля. В данном приводе магнитный полюс способен функционировать без необходимости дополнительного переключения, поэтому направления тока и цепная коммутация делаются очень просто С помощью одного транзистора на каждую обмотку. При этом учитываются переключение фазы:
Двухфазный мотор очень простой, его можно установить человеку без специального опыта. Независимо от того, собрали ли вы его самостоятельно или приобрели в готовом виде, он имеет два типа обмотки для катушек:Если шаговый двигатель имеет одну обмотку с центральным магнитным краном, что влияет на каждую фазу, то это униполярный повод. Каждую обмотувальної секцию следует включить, с целью обеспечения нужного направления магнитного поля. В данном приводе магнитный полюс способен функционировать без необходимости дополнительного переключения, поэтому направления тока и цепная коммутация делаются очень просто С помощью одного транзистора на каждую обмотку. При этом учитываются переключение фазы:
- три провода на фазу;
- шесть на выходной сигнал.
Микроконтроллер двигателя привода можно применять с целью активизации транзистора в той или иной последовательности.А обмотки можно подключать с помощью прикосновения проводов соединения вместе с постоянными магнитами поводу. При соединении катушечные клемм, повернуть вал будет трудно. Сопротивление между котушковим торцом и общим проводом равно половине сопротивления катушечные и проводных торцов. Это выглядит так, поскольку общий провод имеет большую длину, чем половинная часть, которая используется для соединения катушек.Биполярные шаговые двигатели имеют одну фазовую обмотку, в которую ток поступает переломным способом с применением магнитного полюса. Управляющая система в данном случае будет сложной с использованием соединяющего моста. На фазу есть в наличии два провода, но они не общие. При смешивании сигнала шагового двигателя на высоких частотах, эффект трения системы может быть понижен.Кроме того, еще одним типом шагового двигателя является трехфазный, но сфера его применения очень узкая:
- при работе фрезерных станков с ЧПУ;
- на некоторых автомобилях, где применяется дроссель;
- на дисководе и принтерах некоторых марок.
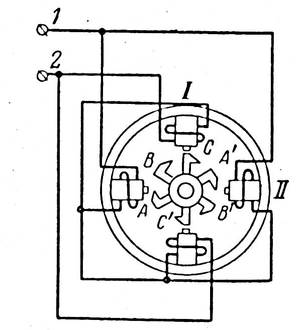
Реактивные шаговые двигатели: особенности и принцип работы
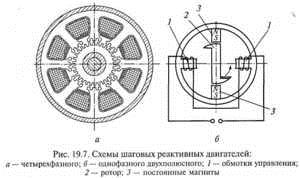 Стоит отметить, что активные шаговые приводы имеют большой недостаток: это большой шаг, достигает нескольких десятков градусов. В отличие от них, реактивные шаговые двигатели способны редуцировать роторную частоту, Благодаря чему шаг становится угловым менее градуса.Главной особенностью реактивного привода является то, что зубцы размещены на статорных полюсах. Синхронизирующий момент в нем обеспечивается разностью магнитных сопротивлений по поперечной и продольной оси привода.Реактивный шаговый двигатель имеет один ключевой недостаток: в нем отсутствует синхронизирующий момент Если обмотки статора обесточены.Повысить степень редукции двигателя, причем независимо которого, активного или реактивного, можно при использовании многопакетних конструкций, когда зубцы статора сдвигаются друг на друга на часть деления, а ротора каждого пакета не сдвигаются и оси их полюсов одинаковы. подобная конструкция очень сложная в плане создания и стоит в готовом виде недешево, также к ней нужно сложный коммутатор.На сегодняшний день в продаже можно найти множество всевозможных конструкций двигателей, которые отличаются по таким параметрам, как:
Стоит отметить, что активные шаговые приводы имеют большой недостаток: это большой шаг, достигает нескольких десятков градусов. В отличие от них, реактивные шаговые двигатели способны редуцировать роторную частоту, Благодаря чему шаг становится угловым менее градуса.Главной особенностью реактивного привода является то, что зубцы размещены на статорных полюсах. Синхронизирующий момент в нем обеспечивается разностью магнитных сопротивлений по поперечной и продольной оси привода.Реактивный шаговый двигатель имеет один ключевой недостаток: в нем отсутствует синхронизирующий момент Если обмотки статора обесточены.Повысить степень редукции двигателя, причем независимо которого, активного или реактивного, можно при использовании многопакетних конструкций, когда зубцы статора сдвигаются друг на друга на часть деления, а ротора каждого пакета не сдвигаются и оси их полюсов одинаковы. подобная конструкция очень сложная в плане создания и стоит в готовом виде недешево, также к ней нужно сложный коммутатор.На сегодняшний день в продаже можно найти множество всевозможных конструкций двигателей, которые отличаются по таким параметрам, как:
- количество фаз;
- тип размещения обмотки;
- способы фиксации ротора и т.д.
В индукторных шаговых двигателях момент вращения создается при взаимодействии магнитного поля, которое создается статорными обмотками и постоянного магнита, имеющегося в зубчатой части зазора.Синхронизирующий момент в індукторні двигателе сам по себе реактивный, благодаря чему получается статорная обмотка, а постоянный магнит способен создавать момент фиксации, благодаря чему ротор удерживается в нужном положении при соответствующем токе.В отличие от реактивного шагового двигателя, індукторний, при аналогичном шаге, имеет больший синхронизирующий момент, а также более улучшенные технические характеристики.